Différents types de prothèses |
| La prothèse myoélectriqueLes prothèses myoélectriques existent depuis un certain temps et peuvent être considérées comme des précurseurs de la prothèse bionique que nous verrons dans un second temps. Elles sont majoritairement destinées à l'appareillage des amputations de l'avant-bras . Elles permettent une préhension active des objets en utilisant les muscles subsistants au niveau du moignon.
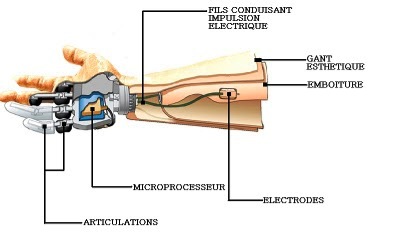
La prothèse est contrôlée par les impulsions et les contractions musculaire envoyées par le bras. En effet chaque contraction d'un muscle engendre une tension électrique très faible qui peut être mesurée sur la peau. Pour cela, on installe des électrodes, au contact de la peau, qui captent ces signaux. Il faut déterminer le « point moteur » : endroit où les impulsions musculaires sont les plus fortes. Ce point sera l’endroit où seront placées les électrodes pour le fonctionnement optimal de la prothèse « myo ».
Après amplification, le signal électrique est envoyé vers un microprocesseur chargé de contrôler les moteurs. Ainsi les impulsions musculaire du moignon permettent d'actionner toute la mobilité de la main. Pour finir, la prothèse est recouverte d'un gant de recouvrement esthétique qui donne à l'ensemble une finition naturelle. |
Bien entendu, un long travail de rééducation est indispensable pour apprendre à contrôler ces contractions. Progressivement, le patient ne pensera plus à "ouvrir et fermer" mais "prendre et lâcher" : cette main fera alors partie de son schéma corporel.
Le bras bioniqueLe premier homme à avoir pu bénéficier d'un bras bionique est Jesse Sullivan en 2001 suivi par la première femme Claudia Mitchell en 2005. Ce type de prothèse entièrement autonome permet d'effectuer des mouvements complexes contrôlés par la pensée.
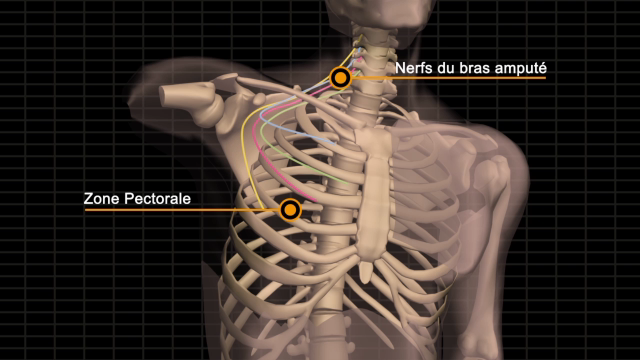
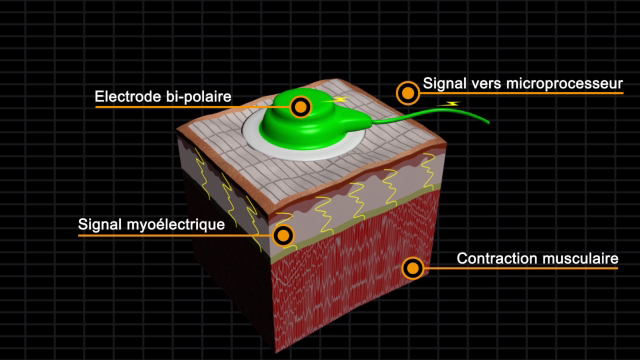
L'installation d'un bras bionique nécessite une intervention chirurgicale appelé "réinnervation ciblée" ou TMR (Targeted Muscle Reinnervation) Après une amputation, les nerfs qui innervent le bras sont inutiles, et les muscles de la poitrine aussi. La TMR prévoit de remplacer les nerfs de la zone musculaire pectorale par les nerfs sectionnés. Pour cela on dévie les nerfs du bras amputé vers cette zone. Ainsi, lorsque le patient décidera de bouger la prothèse, la commande motrice, émise par l’encéphale et véhiculée par les nerfs du bras délocalisés, va provoquer la contraction musculaire de la zone pectorale réinnervée. Cette contraction musculaire génèrera un champ électrique suffisamment important pour pouvoir être recueilli à distance, à la surface de la peau. La perception de ce signal par les électrodes permettra la transmission de l’information biologique vers la prothèse mécanique pour pouvoir la mettre en action de manière relativement intuitive. |
|
